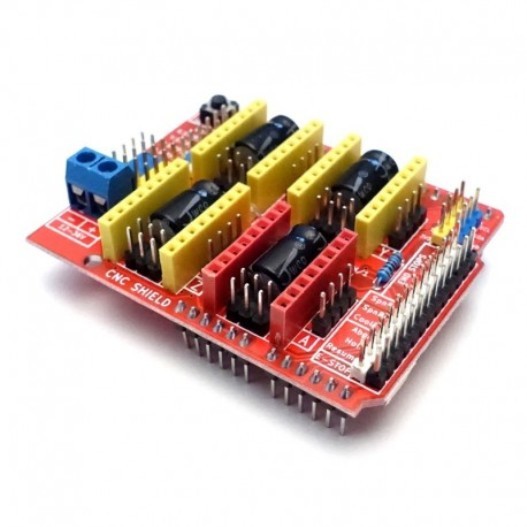

Esta placa de expansão como uma placa de expansão de driver, pode ser usada para máquinas de gravação, impressoras 3D.
É um total de quatro slots, pode conduzir quatro motor de passo A4988. Cada motor de passo de estrada só precisa de duas portas IO. Em outras palavras, seis portas IO podem ser bem gerenciadas com três motores de passo. Muito conveniente de usar.
UNO para Arduino módulo IO porta correspondência introdução:
UNO para Arduino ——– placa de expansão
8 ——– EN (driver de motor de passo habilitar, ativo baixo)
7 ——– Z.DIR (Z – controle de direção do eixo)
6 ——– Y.DIR (controle de direção do eixo Y)
5 ——– X.DIR (controle de direção do eixo X)
4 – ——- Z.STEP (Z – controle de passo de eixo)
3 ——– Y.STEP (E – controle de passo de eixo)
2 ——– X.STEP (eixo x controlo de passo)
/ / O que se segue é uma simples procedimentos de motor passo a passo de controlo
#define NO 8 / / permitir motor de passo baixo activo
X_DIR #define 5 / / X -axis direcção controlo de passo do motor
#define Y_DIR 6 / / y direcção -axis controlo de passo do motor
#define passo direcção do eixo Z_DIR 7 / / z controlo do motor
#define X_STP 2 / / eixo x de controlo de passo
#define Y_STP 3 / / e – controle passo a passo do eixo
# define Z_STP 4 / / z -ster controle de passo
/ *
/ / Função: passo. função: para controlar a direção do motor de passo, o número de etapas.
/ /: Parâmetros de controlo direccional dir dirPin DIR pino correspondente motor passo a passo, o motor de passo stepperPin correspondente pino de “passo”, Passo número de etapa de nenhum valor de retorno. Passo
* /
void (boolean dir, byte dirPin, byte stepperPin, passos int)
{
digitalWrite (dirPin, dir);
atraso (50);
para (int i = 0; i
digitalWrite (stepperPin, ALTA);
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {/ / O motor passo a passo utilizado no pino IO é definir a saída
pinMode (X_DIR, oUTPUT); pinMode (X_STP, oUTPUT);
pinMode (Y_DIR, oUTPUT); pinMode (Y_STP, oUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, BAIXO);
}
void loop () {
passo (falso, X_DIR, X_STP, 200); // O motor do eixo X inverte 1 anel, o passo 200 é um círculo.
passo (falso, Y_DIR, Y_STP, 200); / / e o motor do eixo inverte 1 anel, o passo 200 é um círculo.
passo (falso, Z_DIR, Z_STP, 200); / / motor do eixo z reverter 1 anel, o passo 200 é um círculo.
atraso (1000);
passo (verdadeiro, X_DIR, X_STP, 200); // Motor do eixo X avança 1 voltas, o passo 200 é um círculo.
passo (verdadeiro, Y_DIR, Y_STP, 200); / / e o motor do eixo avança 1 voltas, o passo 200 é um círculo.
passo (verdadeiro, Z_DIR, Z_STP, 200); / / motor do eixo z frente 1 voltas, o passo 200 é um círculo.
atraso (1000);
}
Nota: Ao inserir o módulo A4988, deve ter cuidado para não inserir o oposto. ligação do motor de passo segue como:
2A, 2B é um grupo (vermelho, verde), 1A, 1B é um grupo (azul, amarelo), se deseja mudar de direcção, pode ser alterar a posição de um grupo, por exemplo 2A, 2B trocados mutuamente