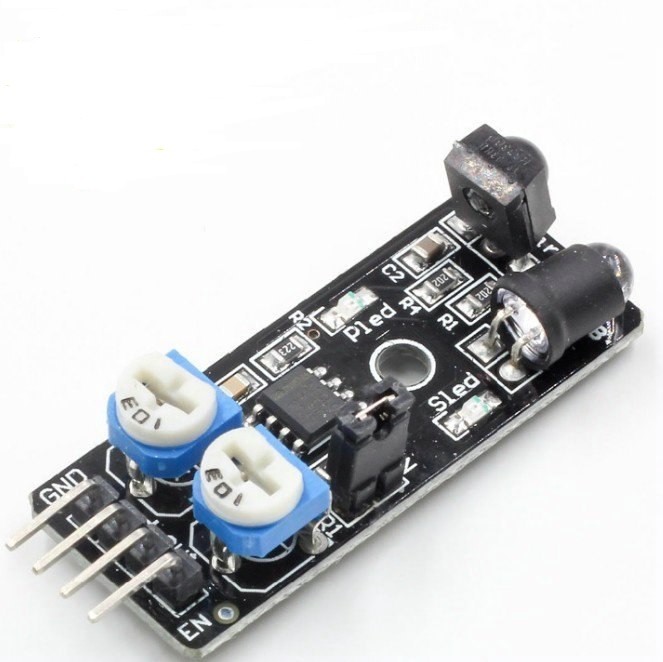

Descrição:
Tensão de Trabalho: DC 3.3V-5V
Corrente de trabalho: 20mA
Temperatura de trabalho: -10degree + 50degree
Detecção de distância: 2-40cm
interface de IO: 4 line (- / + / S / EN)
Sinal de Saída: TTL Nível
modo de Ajuste: multi resistência regulação
ângulo efetivo: 35 °
REF: KY0032
Tamanho: 4.5×1.1cm (aprox)
exemplo de código:
// Este é um código de exemplo sobre como utilizar o obstáculo sensor de evitar KY-0032
// Este sensor funciona da mesma como sensores de aviso nos carros. Usado em muitos projetos de robôs.
int Buzzer = 3;
int AvoidancePin = 4; // define a interface do sensor de impedimento de obstáculos
int RedLed = 5;
int GreenLed = 6;
int val; // Valor Alto ou BAIXO.
// aqui eu configurei os tons, você pode alterá-los @ void loop.
int tones [] = {261, 277, 293, 311, 329, 349, 369, 392, 415, 440, 466, 493, 523, 554};
// 1 2 3 4 5 6 7 8 9 10 11 12 13 14
// Você pode adicionar mais tons, mas eu adicionei 14. Basta preencher o que você gostaria de usar, @ loop void você vê “tom (Buzzer, tons [12]); “abaixo, digitalWrite (Buzzer, HIGH);
// aqui você pode alterar os tons preenchendo um número entre 1 e 14
void setup ()
{
Serial.begin (9600);
pinMode (RedLed, OUTPUT);
pinMode (GreenLed, OUTPUT);
pinMode (Buzzer, OUTPUT);
pinMode (AvoidancePin, ENTRADA); // definir a interface de saída do sensor obstáculo evitar
}
void loop ()
{
val = digitalRead (AvoidancePin); // Leitura do AvoidancePin
se (val == ALTA)
{
digitalWrite (RedLed, LOW);
digitalWrite (GreenLed, ALTO);
digitalWrite (Buzzer, LOW);
noTone (Buzzer);
atraso (100);
}
mais
{
digitalWrite (RedLed, HIGH);
digitalWrite (GreenLed, LOW);
digitalWrite (Buzzer, ALTO);
tone (Buzzer, tones [6]) // Você pode mudar o tom escolhendo de 1 a 14.
delay (100);
}
}